Description
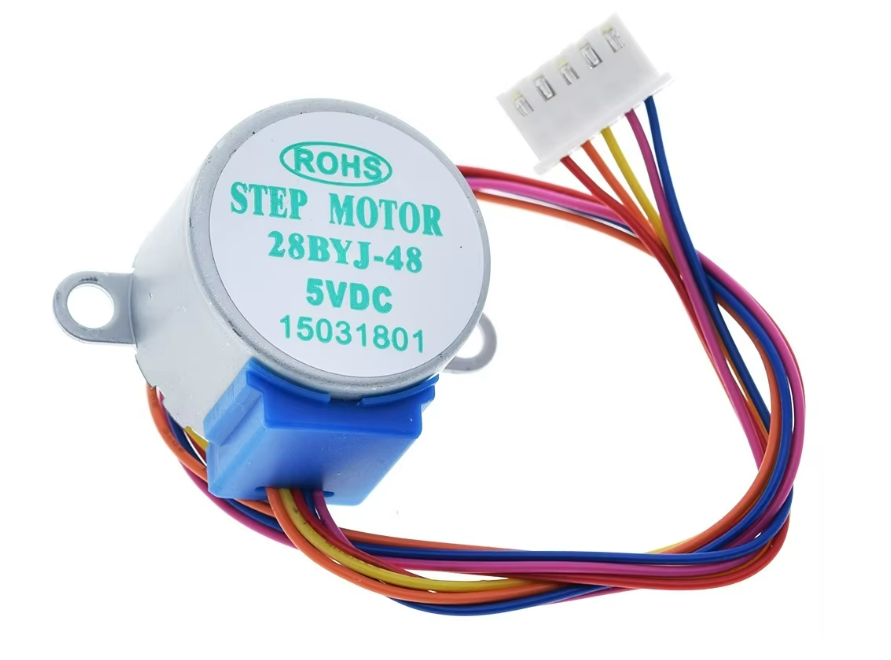
El motor 28BYJ-48 5V es un motor paso a paso muy comúnmente utilizado en proyectos de electrónica y robótica, especialmente en aplicaciones que requieren una rotación precisa y controlada.
-
Tipo de motor:
- Es un motor paso a paso unipolar, lo que significa que se mueve en pasos definidos, lo que lo hace ideal para aplicaciones que requieren un control de posición preciso.
-
Alimentación:
- Este motor funciona con una tensión de 5V, lo que lo hace compatible con muchas placas de desarrollo como Arduino y Raspberry Pi.
-
Pasos por revolución:
- El motor tiene 64 pasos por revolución, lo que significa que realiza 64 movimientos discretos por cada vuelta completa del eje.
- Cada paso representa un ángulo de 5.625 grados (360° / 64 pasos).
-
Torque y velocidad:
- El 28BYJ-48 tiene un torque relativamente bajo en comparación con otros motores paso a paso, por lo que es más adecuado para aplicaciones que no requieren grandes fuerzas.
- Su velocidad de rotación es controlada por los pasos que se envían a las bobinas del motor, pero generalmente no es tan rápido como otros motores.
-
Reducción:
- El motor está acoplado a un reductor de engranajes (gears reduction), lo que significa que tiene una relación de reducción que aumenta el par motor pero reduce la velocidad.
- La relación de reducción típica de este motor es de 1:64, lo que significa que por cada 64 revoluciones del motor, el eje del reductor da una sola vuelta.
-
Control:
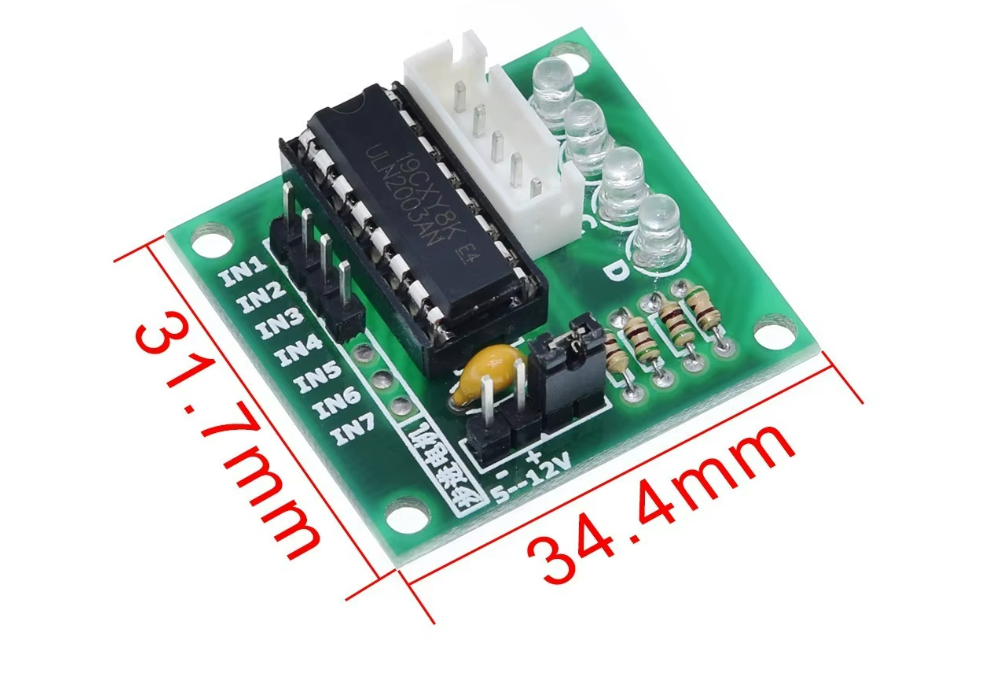
- Para controlar este motor, generalmente se utiliza un driver de motor paso a paso, como el ULN2003, que permite controlar el motor en función de los pasos y direcciones.
-
Usos comunes:
- El motor 28BYJ-48 se utiliza comúnmente en aplicaciones de bajo costo como impresoras, ventiladores, relojes, robots, y otros dispositivos electrónicos donde se requiere un control de posición preciso a bajas velocidades.
En resumen, el 28BYJ-48 5V es una opción económica y eficiente para tareas de posicionamiento donde la fuerza no es un requisito crítico, pero la precisión es importante.
El ULN2003 es el controlador más comúnmente utilizado para manejar este motor paso a paso, ya que amplifica las señales de baja corriente de un microcontrolador para energizar las bobinas del motor de manera adecuada.
A continuación te muestro cómo conectar y controlar el motor 28BYJ-48 5V con el controlador ULN2003 usando un Arduino.
Componentes necesarios:
- Motor 28BYJ-48 5V
- Controlador ULN2003
- Arduino (uno, nano, etc.)
- Cables de conexión
- Fuente de alimentación de 5V (por ejemplo, un adaptador USB o batería de 5V)
Conexiones:
- Motor 28BYJ-48 a ULN2003:
- El motor 28BYJ-48 tiene 4 cables que corresponden a sus bobinas. Estos cables se conectan a las salidas del ULN2003:
- OUT1 (pin 1 del ULN2003) → Bobina A del motor.
- OUT2 (pin 2 del ULN2003) → Bobina B del motor.
- OUT3 (pin 3 del ULN2003) → Bobina C del motor.
- OUT4 (pin 4 del ULN2003) → Bobina D del motor.
- Controlador ULN2003 a Arduino:
- El ULN2003 tiene 4 entradas (IN1, IN2, IN3, IN4) que se conectan a los pines digitales del Arduino para controlar el motor:
- IN1 → Pin digital 8 del Arduino
- IN2 → Pin digital 9 del Arduino
- IN3 → Pin digital 10 del Arduino
- IN4 → Pin digital 11 del Arduino
- Fuente de alimentación:
- VCC del ULN2003 se conecta al pin de 5V de Arduino, o bien, a una fuente externa de 5V.
- COM del ULN2003 se conecta también a 5V para los diodos de protección.
- GND de ULN2003 se conecta al GND de Arduino y a la fuente de alimentación.
Diagrama de conexión:
Código de ejemplo para Arduino:
El siguiente es un código básico para hacer girar el motor en una dirección utilizando las señales de control.
Explicación del código:
- pin1 a pin4 están definidos como las conexiones entre el Arduino y el ULN2003.
- En el
loop(), se aplica una secuencia de activación para mover el motor paso a paso. Cada vez que un pin se pone en HIGH y el resto en LOW, el motor da un paso.
delay(100) controla la velocidad de rotación del motor; puedes ajustar este valor para hacer que el motor gire más rápido o más lento.
Resumen:
- Conectamos las salidas del ULN2003 a las bobinas del motor 28BYJ-48.
- Conectamos las entradas del ULN2003 a los pines de control del Arduino.
- Proporcionamos una fuente de 5V al ULN2003 y al motor.
- El código de Arduino controla el motor paso a paso a través del ULN2003.
Este es un esquema básico para comenzar a trabajar con el motor 28BYJ-48 y el controlador ULN2003. Puedes experimentar con diferentes secuencias y ajustes para controlar la dirección y la velocidad del motor.




 Add Contact: +51946987981
Amount to PayS/0.00
Add Contact: +51946987981
Amount to PayS/0.00





Reviews
There are no reviews yet.