Your cart is currently empty!
KIT DE ROBOTICA BASADO EN ARDUINO
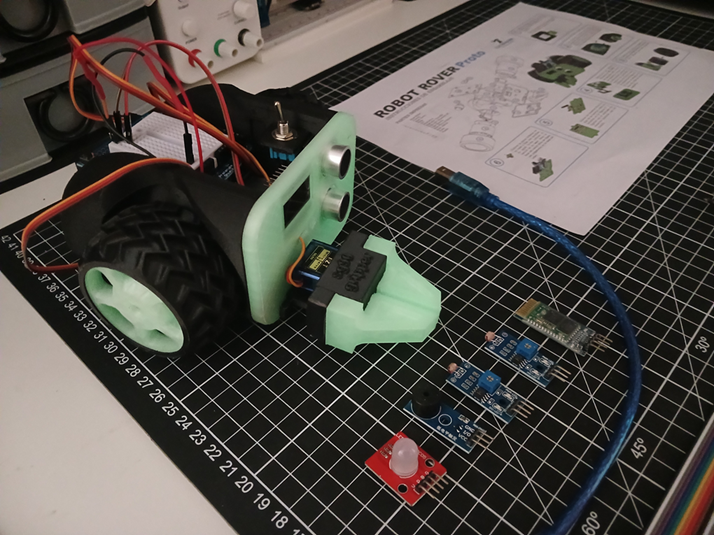
El Kit de Robótica Basado en Arduino es una solución completa para aprender y experimentar con la robótica y la programación.
20% DESCUENTO
20% DESCUENTO
20% DESCUENTO

20% DESCUENTO

¡Qué emocionante que estés armando tu primer robot con Arduino! Es una excelente manera de aprender sobre robótica, electrónica y programación. te daremos una guía básica de cómo puedes armar tu primer robot con Arduino:
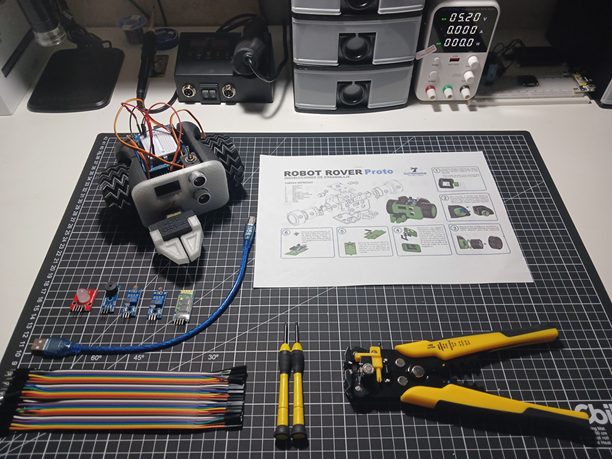
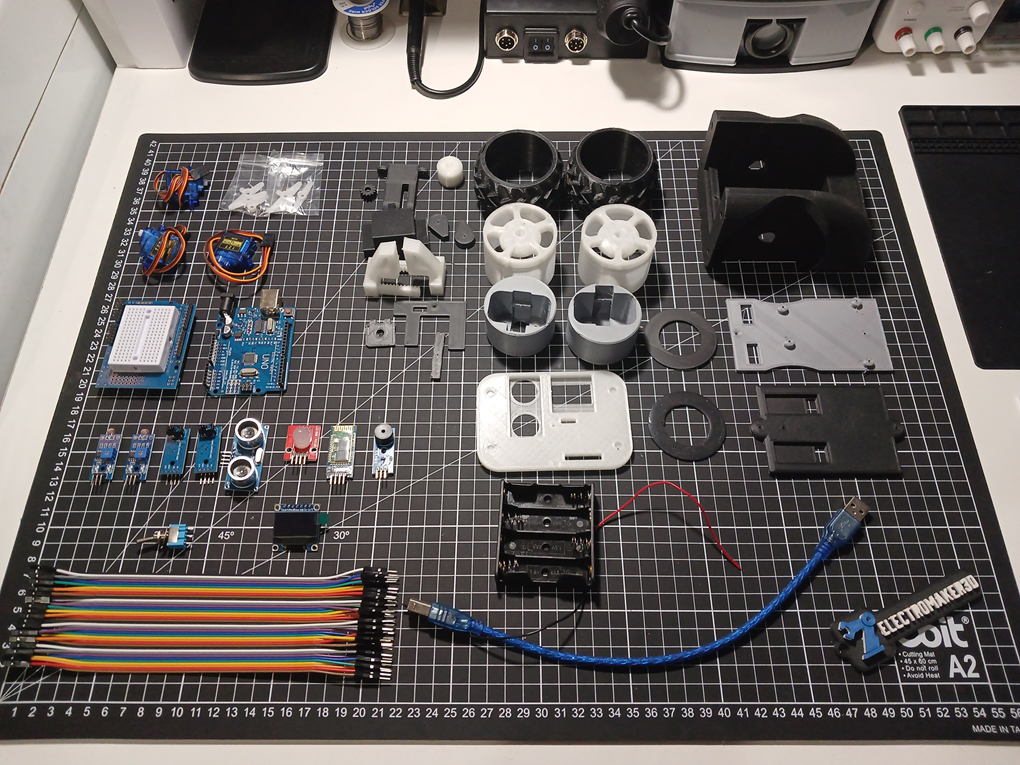
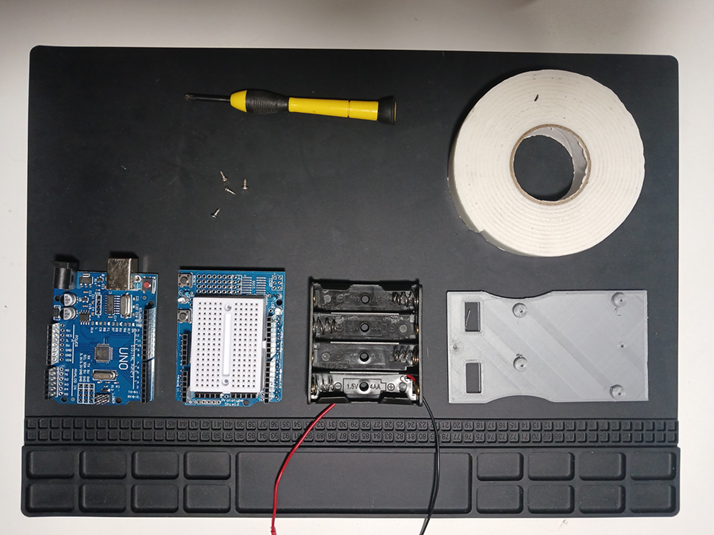
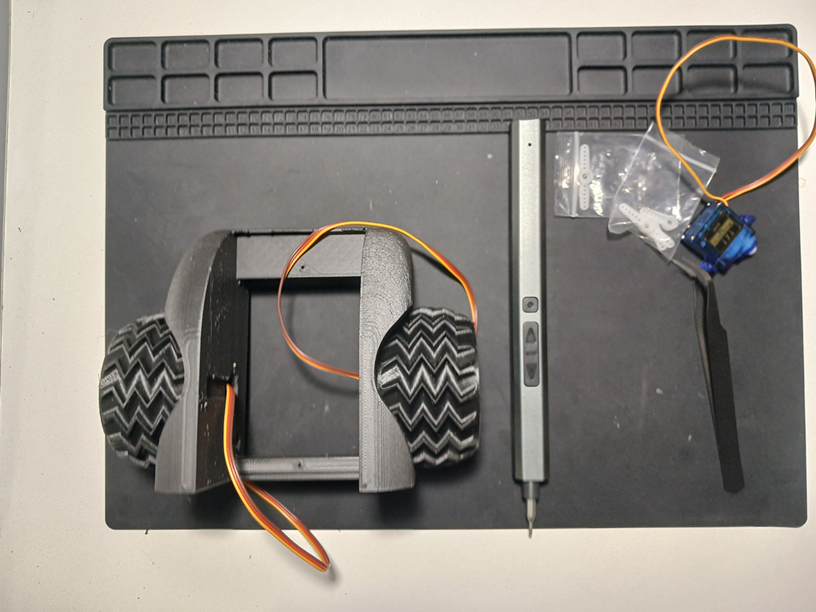
El kit de robótica incluye los siguientes compontes:

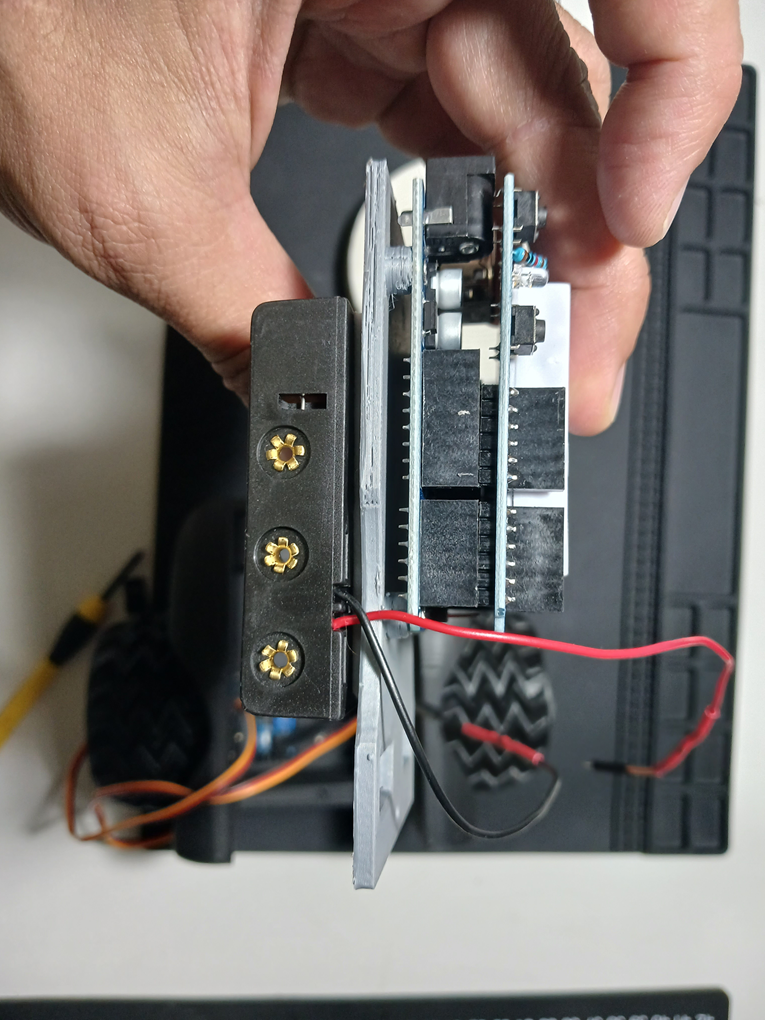
Colocar los tornillos, como se muestra en la figura 1 para ajustar la base del servo derecho. Repetir en el lado izquierdo. Nota: la base del servo no es simétrica, debe colocarlo como se muestra en la figura.
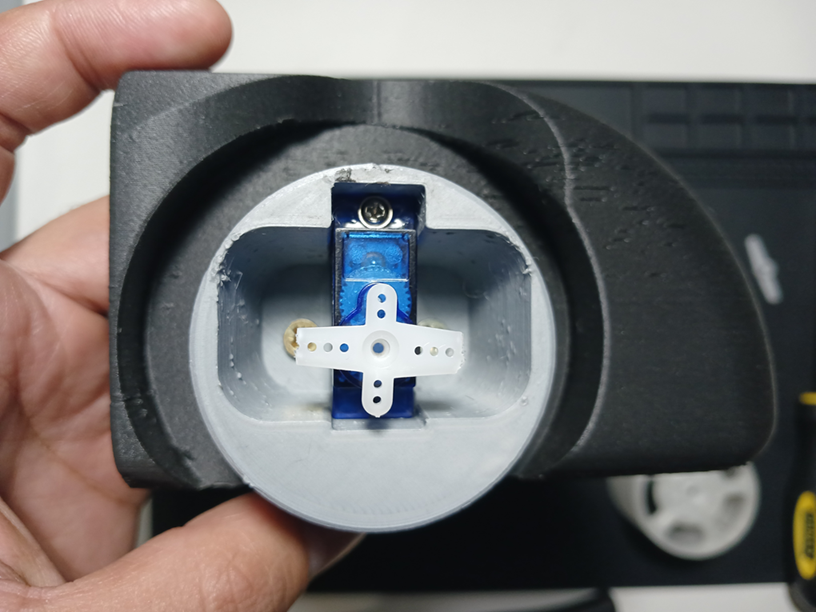
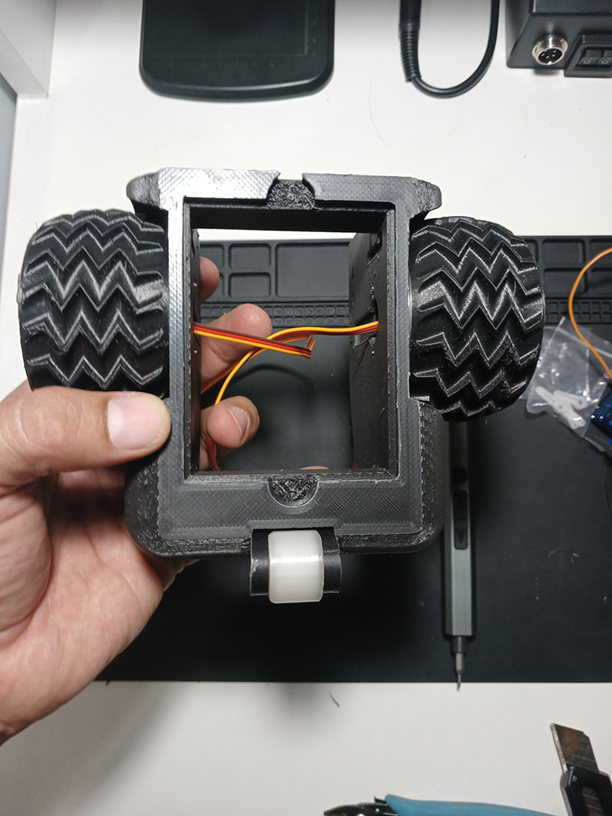
Has recibido 3 bolsas con servos y accesorios, debes seleccionar los servos que indican 360 y colocarlos como indica la figura 2, haz uso de 2 tornillos incluidos en las bolsas. Repetir para lado izquierdo.
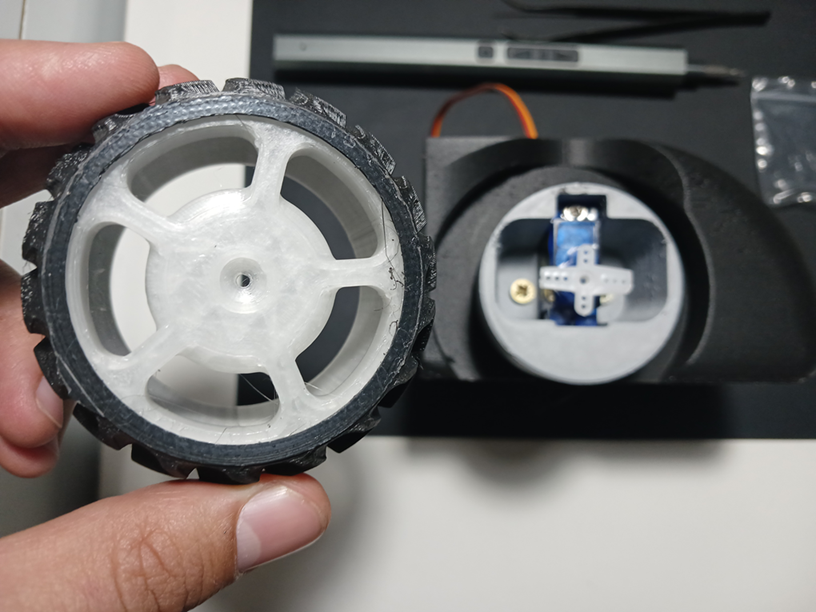
Coloca el aro, el ring y el neumático y ajustar con tornillo incluido en la bolsa del servo. Repetir para lado izquierdo.
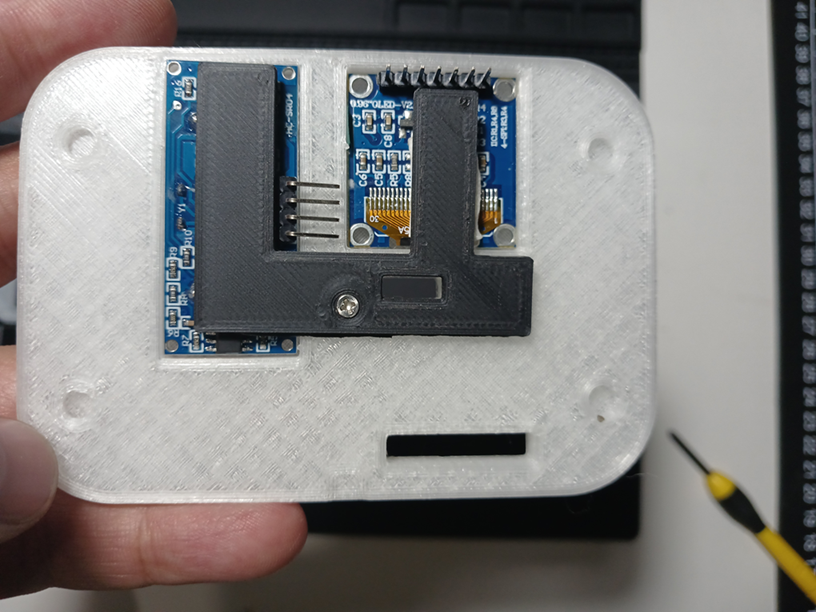
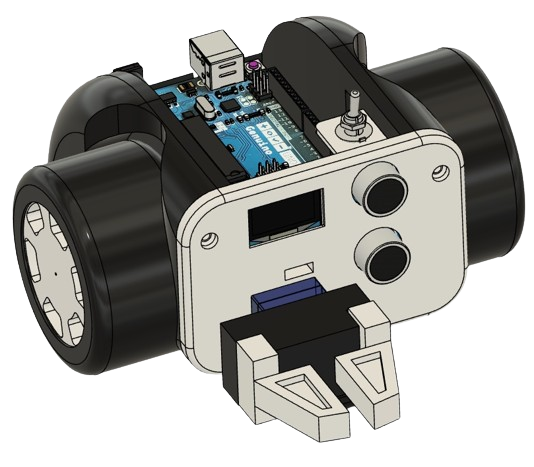
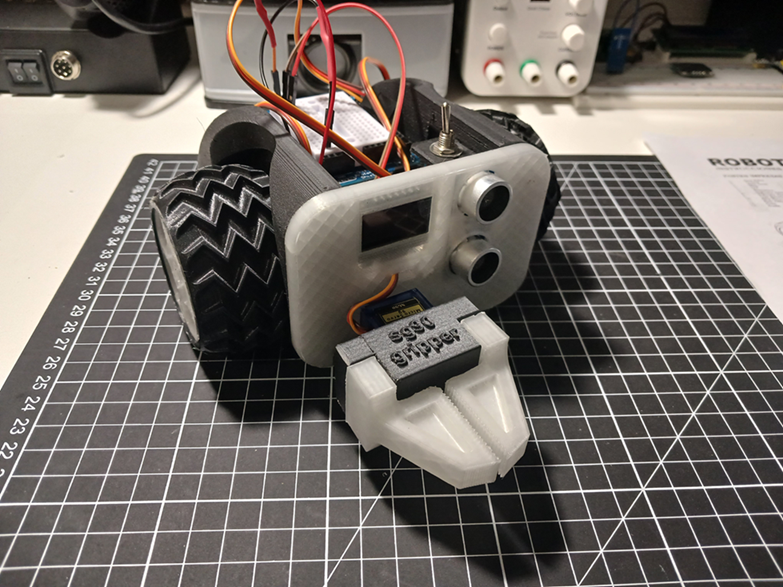
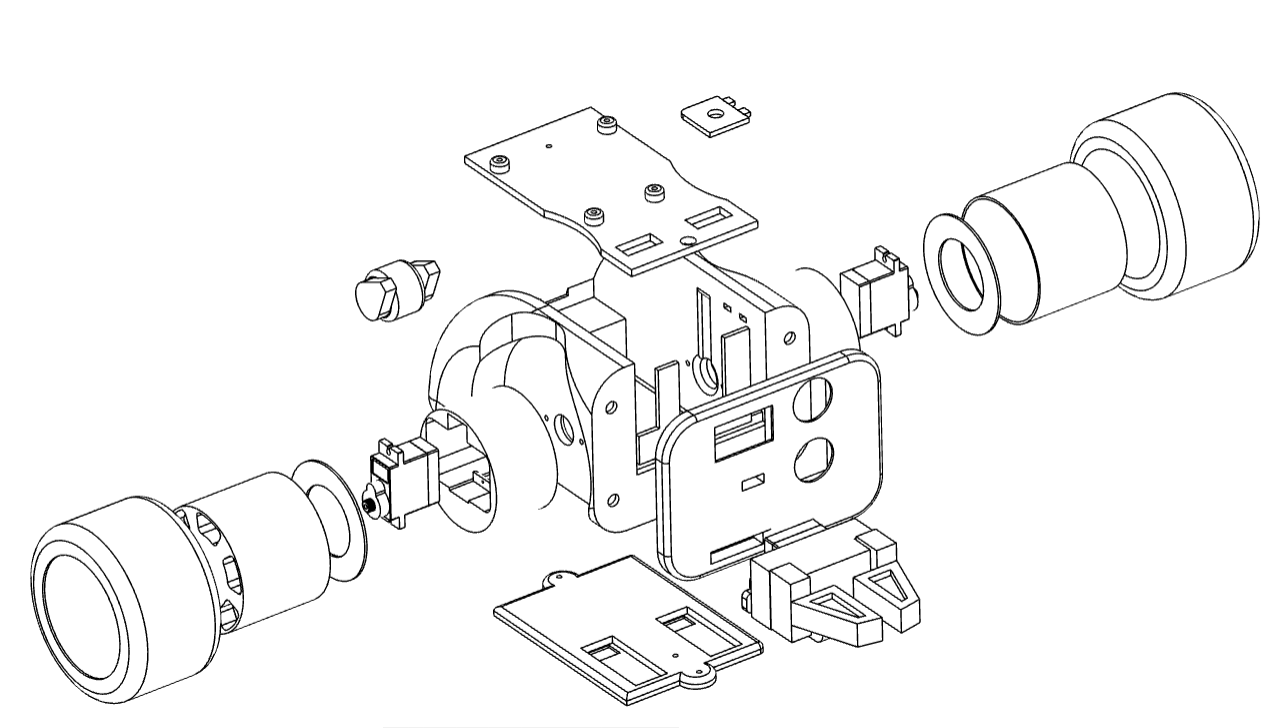
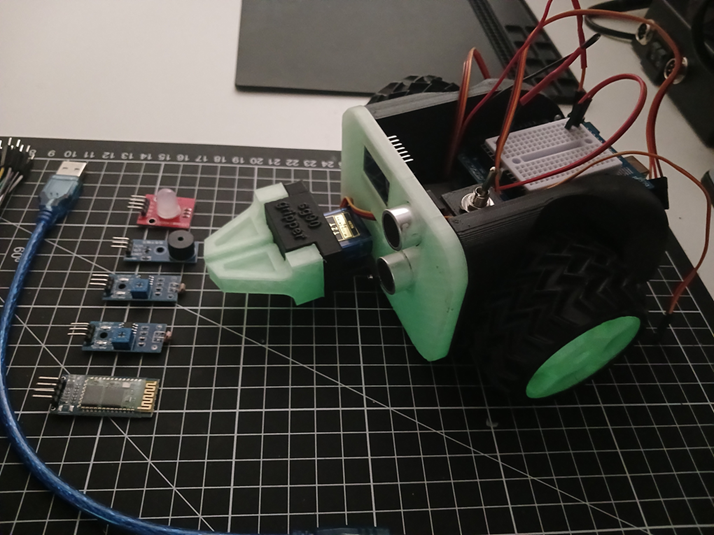
Recibiste un sensor ultrasónico H C – S R 0 4 y una pantalla oled, sujetar con cuidado y colocar en la base frontal, colocar el soporte de pantalla y ajustar con tornillo como se muestra en la figura 4. El fontal se acopla a la base del robot con 2 tornillos.
Has recibido 3 bolsas con servos y accesorios, debes seleccionar los servos que indican 360 y colocarlos como indica la figura 2, haz uso de 2 tornillos incluidos en las bolsas. Repetir para lado izquierdo.
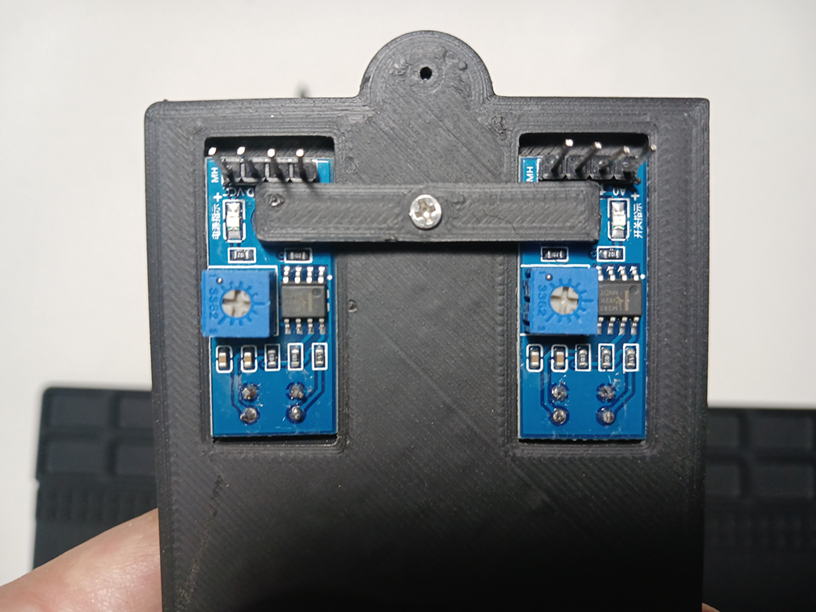
Colocar los sensores IR en la tapa de la batería, como se muestra en la figura y fijarlos con el sujetador de sensores haciendo uso del tornillo


Conectaremos el siguiente diagrama con nuestro Arduino
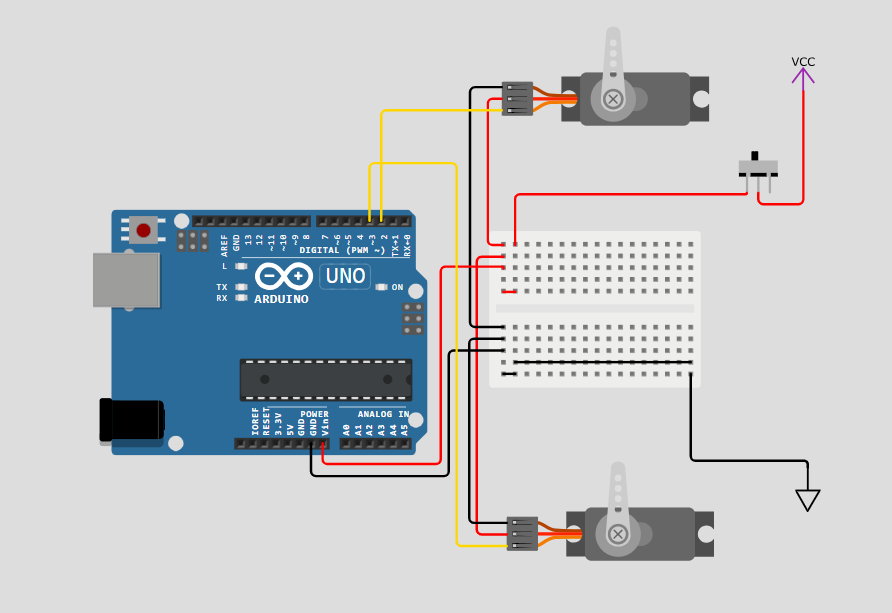
Este programa moverá el robot hacia adelante, hacia atrás, y girará a la izquierda o derecha según el comando.
cppCopiar#include <Servo.h> // Librería para controlar servos
// Definir los pines de los servos
Servo servoIzquierdo;
Servo servoDerecho;
void setup() {
// Conectar los servos a los pines de Arduino
servoIzquierdo.attach(2); // Servo izquierdo en el pin 9
servoDerecho.attach(3); // Servo derecho en el pin 10
}
void loop() {
// Mover hacia adelante
servoIzquierdo.write(180); // Rueda izquierda avanza (180 grados)
servoDerecho.write(0); // Rueda derecha avanza (0 grados)
delay(2000); // Esperar 2 segundos
// Detenerse
servoIzquierdo.write(90); // Detener rueda izquierda (90 grados)
servoDerecho.write(90); // Detener rueda derecha (90 grados)
delay(1000); // Esperar 1 segundo
// Mover hacia atrás
servoIzquierdo.write(0); // Rueda izquierda retrocede (0 grados)
servoDerecho.write(180); // Rueda derecha retrocede (180 grados)
delay(2000); // Esperar 2 segundos
// Detenerse
servoIzquierdo.write(90); // Detener rueda izquierda
servoDerecho.write(90); // Detener rueda derecha
delay(1000); // Esperar 1 segundo
// Girar a la izquierda
servoIzquierdo.write(0); // Rueda izquierda retrocede
servoDerecho.write(0); // Rueda derecha avanza
delay(1000); // Esperar 1 segundo
// Detenerse
servoIzquierdo.write(90); // Detener rueda izquierda
servoDerecho.write(90); // Detener rueda derecha
delay(1000); // Esperar 1 segundo
// Girar a la derecha
servoIzquierdo.write(180); // Rueda izquierda avanza
servoDerecho.write(180); // Rueda derecha retrocede
delay(1000); // Esperar 1 segundo
// Detenerse
servoIzquierdo.write(90); // Detener rueda izquierda
servoDerecho.write(90); // Detener rueda derecha
delay(1000); // Esperar 1 segundo
}
Servo.h: Es la librería que permite controlar los servos fácilmente.servoIzquierdo.attach(9) y servoDerecho.attach(10): Conectamos los servos a los pines 9 y 10 de Arduino.servo.write(ángulo): Mueve el servo al ángulo especificado (0° a 180°).0° generalmente significa que el servo va hacia atrás.180° significa que el servo avanza.90° es la posición neutra (parada).delay(2000): Hace que el programa espere 2 segundos (o el tiempo que indiques) antes de pasar al siguiente comando.Este es un esquema muy básico. Si tu robot tiene más componentes o quieres controlarlo de manera más avanzada (con control remoto, sensores, etc.), el código se puede hacer más complejo.
 Add Contact: +51946987981
Amount to PayS/0.00
Add Contact: +51946987981
Amount to PayS/0.00
You must scan the QR code, click continue to attach the screenshot (it is the only proof of payment) and you will be able to complete the purchase.